ROS and simulation
Gazebo
From Gazebo documentation:
- Gazebo is a 3D dynamic simulator for simulating robots, environments and sensors.
- Gazebo offers physics simulation, typicaly much better than simulators in game engines. It supports various physical engines: ODE, Bullet, Simbody, DART.
- Gazebo is typical used for testing robotics algorithms in realistic scenarios.
- Gazebo has repository of 3D models: http://models.gazebosim.org/.
- Gazebo has good support:
- documentation,
- tutorials,
- use cases and examples.
A few key features of Gazebo include:
- multiple physics engines,
- a rich library of robot models and environments,
- a wide variety of sensors,
- convenient programmatic and graphical interfaces.
Why use Gazebo? Simulation of robots is fundamental part of developement and testing of applications and algorithms.
Gazebo can be run in terminal with command
See tutorial http://gazebosim.org/tutorials?tut=quick_start
Gazebo GUI
https://classic.gazebosim.org/tutorials?cat=guided_b&tut=guided_b2
URDF
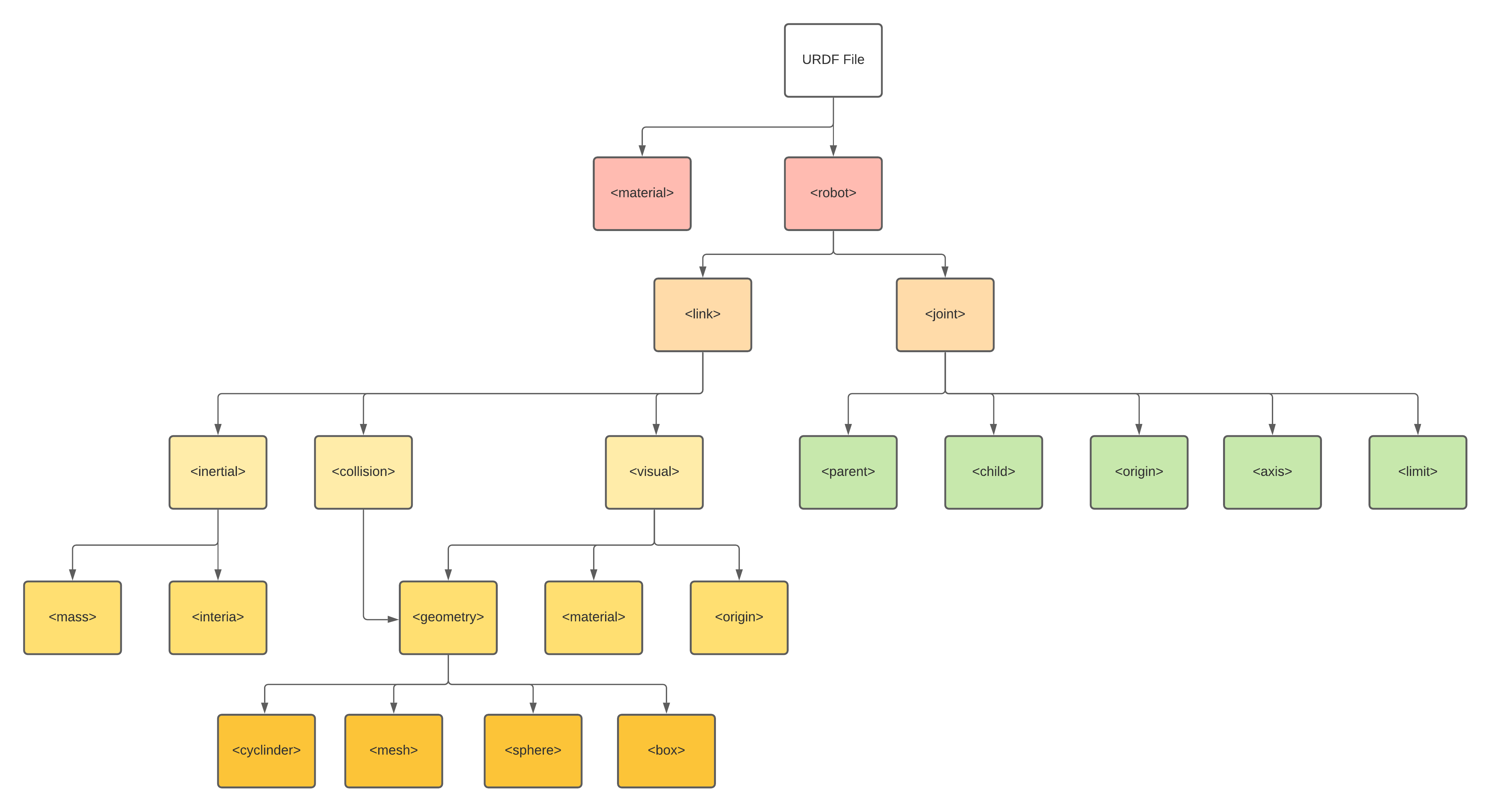
URDF, or Unified Robot Description Format, is an XML format used in ROS to describe a robot's physical structure. It includes definitions for robot links and joints, detailing aspects like dimensions, shapes, materials, and the physical constraints between parts. Understanding URDF is crucial because it allows for accurate simulation, visualization, and control of robots in environments like Gazebo and tools like MoveIt!.
Basic Components of URDF
Links
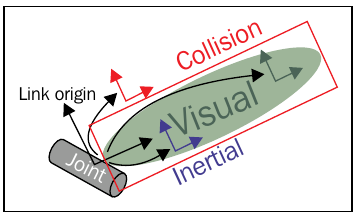
Links represent the rigid parts of a robot, such as arms, wheels, or a base. Each link has several attributes that describe its physical properties:
- Name: A unique identifier for each link.
- Inertial Properties: Defines the mass, inertia, and center of mass for accurate physics simulation. This is crucial for ensuring the robot behaves realistically under forces like gravity.
- Visual Properties: Specifies how the link appears in the simulation. This includes the shape (e.g., box, cylinder, mesh), dimensions, color, and material.
- Collision Properties: Describes the shape and size used for collision detection in the simulation. It's common to use simplified shapes to reduce computational complexity.
<link name="base_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0" />
<mass value="1.0" />
<inertia ixx="0.1" ixy="0.0" ixz="0.0" iyy="0.1" iyz="0.0" izz="0.1" />
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="1 1 0.5" />
</geometry>
<material name="blue">
<color rgba="0 0 1 1" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="1 1 0.5" />
</geometry>
</collision>
</link>
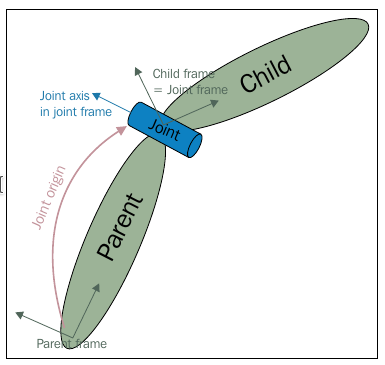
Joints
Joints define the relationships and movements between two links. Each joint specifies the type of movement allowed (rotational, linear, etc.) and the axis along which this movement occurs:
- Name: A unique identifier for each joint.
- Type: Specifies the joint type (e.g., revolute, prismatic, fixed). The revolute joint allows rotation, while the prismatic joint allows linear movement. Fixed joints do not allow any movement and are used to permanently attach links together.
- Parent and Child: Defines which links are connected by the joint.
- Origin: Specifies the position and orientation of the joint relative to the parent link.
- Axis: For joints that allow movement, this defines the axis along which the motion occurs.
<joint name="shoulder_joint" type="revolute">
<parent link="base_link" />
<child link="upper_arm" />
<origin xyz="0 0 0.5" rpy="0 0 0" />
<axis xyz="0 0 1" />
<limit lower="-1.57" upper="1.57" effort="5" velocity="1" />
</joint>
Basic components of a URDF file are links, joints, and their associated visual and collision models. Properly configured links and joints allow for accurate kinematic chains, which are crucial for realistic simulation and precise control. The visual models ensure that the robot is represented correctly in both simulation and visualization tools, while the collision models optimize interactions with the environment by simplifying complex geometries for efficient physics calculations.
URDF and Robot Simulation in Gazebo
URDF provides a standardized way to describe a robot's physical structure, which Gazebo then uses to create an accurate and realistic simulation of the robot and its interactions with the environment. Gazebo relies on the URDF file to construct an accurate simulation of a robot, including its physical appearance, dynamics, sensors, and control systems. By understanding how to define these elements in URDF and link them to Gazebo plugins, you can create robust simulations that mirror real-world scenarios, providing a valuable environment for testing and development in robotics.
How Gazebo Uses URDF Files
Gazebo utilizes URDF files to create a virtual representation of a robot in the simulation environment. The URDF file provides all the necessary details about the robot's physical components, including:
- Geometry and Shape: Defines the robot's physical appearance using basic geometric shapes (like boxes, spheres, and cylinders) or more complex meshes.
- Inertia and Mass: Specifies the physical properties of each link, such as mass distribution and inertia. These properties are crucial for realistic physical interactions like movement, collisions, and response to forces.
- Joints and Constraints: Describes how different parts of the robot are connected and the types of movement allowed (e.g., rotational or linear). Gazebo uses this information to simulate the robot's kinematics and dynamics accurately.
Gazebo reads the URDF file to construct a robot model with all these physical and visual properties, which allows for a realistic simulation environment where the robot can move, interact with other objects, and perform tasks as it would in the real world.
Simulating Physical Interactions
One of the key benefits of using URDF with Gazebo is the ability to simulate realistic physical interactions, which includes:
- Collision Detection: Using the collision properties defined in the URDF, Gazebo can detect when the robot's parts come into contact with other objects or surfaces. This is vital for tasks that require interaction with the environment, such as grasping objects or avoiding obstacles.
- Dynamics and Physics: Gazebo uses the inertial properties from the URDF file to compute how the robot responds to forces, such as gravity, friction, or collisions. This allows the simulation of complex behaviors, such as balancing, jumping, or handling heavy objects.
- Sensors Simulation: URDF files can also include sensors (e.g., cameras, LIDAR, IMUs) that are essential for perceiving the environment. Gazebo simulates these sensors, providing realistic data that can be used for testing perception algorithms and sensor fusion.
Adding Sensors and Actuators to URDF for Gazebo Simulation
To create a more complete and functional simulation, you can add sensors and actuators directly into the URDF file. This allows Gazebo to simulate not only the robot’s structure but also its ability to perceive and interact with the environment:
- Actuators: Motors and servos can also be described in the URDF using the
and tags. These definitions specify how the joints should be controlled, providing the necessary details for integrating with ROS controllers for movement simulation. - Sensors: Sensors like cameras, LIDAR, and ultrasonic sensors can be defined in the URDF file using
tags. These elements provide the simulation parameters for Gazebo to generate realistic sensor data, which can be used in algorithms for object detection, mapping, and navigation.
Example URDF Snippet for Sensors:
<gazebo>
<sensor type="camera" name="camera">
<update_rate>30</update_rate>
<camera>
<horizontal_fov>1.047</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.1</near>
<far>100</far>
</clip>
</camera>
</sensor>
</gazebo>
Linking URDF to Gazebo Plugins
Gazebo plugins extend the functionality of the simulation by providing additional capabilities, such as custom sensor models, advanced control strategies, or environmental interactions. These plugins can be linked to a URDF file to enhance the simulation:
- Adding Plugins in URDF: Plugins are defined within the URDF file using
tags. This allows you to customize the robot's behavior in the simulation beyond the basic physical properties described by URDF. - Types of Plugins: Common plugins include those for differential drive (for wheeled robots), grippers (for manipulation tasks), or custom sensor behavior (for specialized sensors not natively supported by Gazebo).
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<ros>
<namespace>/robot</namespace>
<remapping><remap from="odom" to="/odom" /></remapping>
</ros>
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<updateRate>50</updateRate>
</plugin>
</gazebo>
Integrating URDF with ROS Control and MoveIt!
Using URDF with ROS Control
URDF files are fundamental to ROS Control as they provide detailed descriptions of the robot's kinematic structure and dynamics, which are crucial for setting up controllers. Here’s how URDF integrates with ROS Control:
- Joint and Link Definitions: URDF specifies all the joints and links in a robot, including their kinematic relationships and dynamics. ROS Control uses this information to understand how the joints move and interact.
- Transmission Elements: URDF includes
tags that define how joint states (e.g., position, velocity) are converted into actuator commands and vice versa. These transmissions are critical for interfacing the robot hardware or simulation with ROS controllers. - Controller Configuration: Using the URDF definitions, ROS Control allows configuring different types of controllers (e.g., position, velocity, effort) for the robot joints. The controller configuration is typically defined in YAML files that reference joint names from the URDF.
Example URDF Snippet for Transmission:
<transmission name="shoulder_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="shoulder_joint">
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
<actuator name="shoulder_motor">
<mechanicalReduction>50</mechanicalReduction>
</actuator>
</transmission>
Setting Up Controllers Using URDF and ROS Control
Once the URDF file is defined with joints and transmissions, ROS Control requires additional configuration to set up controllers:
- Controller Manager: ROS Control uses a controller manager to load, unload, start, and stop controllers dynamically. The manager reads the URDF to understand the robot's structure and uses this information to allocate controllers.
- Loading Controllers: Controllers are loaded using configuration files (typically in YAML format) that reference the URDF-defined joints and specify the type of control (e.g., position, velocity, effort). These configurations map directly to the joints defined in the URDF file.
Example YAML Configuration for ROS Control:
controller_manager:
ros__parameters:
update_rate: 100
my_position_controller:
type: joint_trajectory_controller/JointTrajectoryController
joints:
- shoulder_joint
- elbow_joint
constraints:
goal_time: 0.5
state_publish_rate: 50
action_monitor_rate: 10
stop_trajectory_duration: 0.5
2 DOF robot visualization
Lets first create a new catkin workspace.
Lets create new package for simple 2 DOF robot.
We will create 2 folders:
- folder
urdffor storing urdf files and - folder
launchfor launch files.
Check if required packages are installed with command
We will require packages
We will create urdf file for 2 DOF robot. Move into catkin workspace folder and then into urdf folder.
Create urdf file and open it in editor.
Copy the code into urdf file.
<?xml version="1"?>
<robot name="2dof_robot">
<material name="White">
<color rgba="1.0 1.0 1.0 1.0"/>
</material>
<material name="Blue">
<color rgba="0.0 0.0 1.0 1.0"/>
</material>
<material name="Red">
<color rgba="1 0 0 1.0"/>
</material>
<material name="Black">
<color rgba="0 0 0 1.0"/>
</material>
<link name="world"/>
<!-- BASE LINK-->
<link name="base_link">
<visual>
<geometry>
<box size="0.16 0.16 1.0"/>
</geometry>
<material name="White"/>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<box size="0.16 0.16 1.0"/>
</geometry>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
</collision>
</link>
<joint name="fixed_base" type="fixed">
<parent link="world"/>
<child link="base_link"/>
</joint>
<!-- PRVI SEGMENT-->
<link name="prvi_segment">
<visual>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<material name="Red"/>
<origin xyz="0.12 0.0 0.21" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<origin xyz="0.0 0.0 0.21" rpy="0.0 0.0 0.0"/>
</collision>
</link>
<joint name="prvi_sklep" type="continuous">
<axis xyz="1 0 0"/>
<parent link="base_link"/>
<child link="prvi_segment"/>
<origin xyz="0.0 0 0.92" rpy="-1.5707 0 0"/>
</joint>
<!-- DRUGI SEGMENT-->
<link name="drugi_segment">
<visual>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<material name="Blue"/>
<origin xyz="-0.08 0.0 0.21" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<origin xyz="0.0 0.0 0.21" rpy="0.0 0.0 0.0"/>
</collision>
</link>
<joint name="drugi_sklep" type="continuous">
<axis xyz="1 0 0"/>
<parent link="prvi_segment"/>
<child link="drugi_segment"/>
<origin xyz="0.12 0 0.42" rpy="0 0 0"/>
</joint>
<!-- TCP SEGMENT-->
<link name="TCP_segment">
<visual>
<geometry>
<sphere radius="0.02"/>
</geometry>
<material name="Red"/>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<sphere radius="0.02"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</collision>
</link>
<joint name="TCP_sklep" type="fixed">
<parent link="drugi_segment"/>
<child link="TCP_segment"/>
<origin xyz="-0.08 0 0.46" rpy="0 0 0"/>
</joint>
</robot>
We can visualize the model in rviz with command.
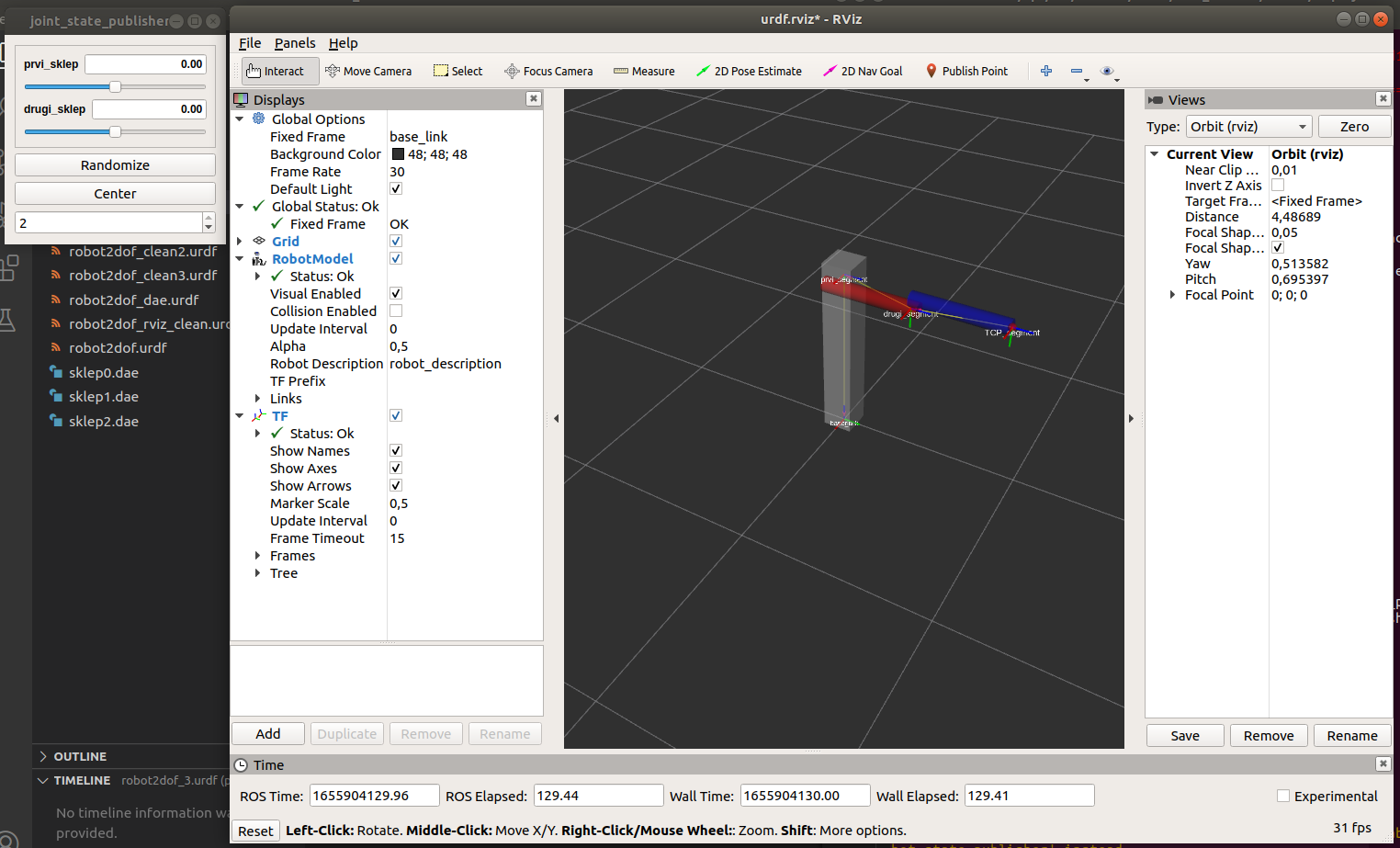
In new terminal window we can list all the ROS topics with command
We receive output
We can print the values of the joints in terminal window with command
Now if we change the values using slider on the GUI we can follow the values of joints.
Visualization of Franka Panda robot
We will now visualize more complex model of the robot, such as Franka Panda robot.
Copy file franka_description.zip into folder src and unzip it.
Run command
In rviz you need to change Fixed Frame (in Global Options) to panda_link0.
Importing 2 DOF robot in gazebo
First, we will create launch file to load urdf file into gazebo. Go to launch folder:
<?xml version="1.0"?>
<launch>
<param name="robot_description" textfile="$(find robot_2dof)/urdf/robot2dof.urdf" />
<include file="$(find gazebo_ros)/launch/empty_world.launch" />
<node pkg="gazebo_ros" name="spawn_urdf" type="spawn_model" args="-param robot_description -urdf -model robot2dof" />
<!-- -->
</launch>
We can run the launch file with command
What we see is only empty gazebo world without the robot. This is because the urdf file does not contain everything we need for simulation in gazebo. First, we need to add <inertial> tag to each link. Gazebo uses physics engine and needs information about ineratial properties of the bodies, including links (documentation) of the robots. If <inertial> property is not added to the link or mass is zero, Gazebo will ignore the link. It is also quite important for stable physical simulation that inertial parameters are quite accurate or at least have reasonable values.
Below is urdf file with added inertial parameters for each link.
<?xml version="1"?>
<robot name="2dof_robot">
<material name="White">
<color rgba="1.0 1.0 1.0 1.0"/>
</material>
<material name="Blue">
<color rgba="0.0 0.0 1.0 1.0"/>
</material>
<material name="Red">
<color rgba="1 0 0 1.0"/>
</material>
<material name="Black">
<color rgba="0 0 0 1.0"/>
</material>
<link name="world"/>
<!-- BASE LINK-->
<link name="base_link">
<visual>
<geometry>
<box size="0.16 0.16 1.0"/>
</geometry>
<material name="White"/>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<box size="0.16 0.16 1.0"/>
</geometry>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
</collision>
<inertial>
<mass value="25"/>
<origin xyz="0.0 0.0 0.5"/>
<inertia ixx="8.741" iyy="8.741" izz="0.4367" ixy="-0.1637" ixz="-0.1023" iyz="-0.1023"/>
</inertial>
</link>
<joint name="fixed_base" type="fixed">
<parent link="world"/>
<child link="base_link"/>
</joint>
<!-- PRVI SEGMENT-->
<link name="prvi_segment">
<visual>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<material name="Red"/>
<origin xyz="0.12 0.0 0.21" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<origin xyz="0.0 0.0 0.21" rpy="0.0 0.0 0.0"/>
</collision>
<inertial>
<mass value="2.5"/>
<origin xyz="0.0 0.0 0.25"/>
<inertia ixx="0.2091" iyy="0.2091" izz="0.002" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<joint name="prvi_sklep" type="continuous">
<axis xyz="1 0 0"/>
<parent link="base_link"/>
<child link="prvi_segment"/>
<origin xyz="0.0 0 0.92" rpy="-1.5707 0 0"/>
</joint>
<!-- DRUGI SEGMENT-->
<link name="drugi_segment">
<visual>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<material name="Blue"/>
<origin xyz="-0.08 0.0 0.21" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<origin xyz="0.0 0.0 0.21" rpy="0.0 0.0 0.0"/>
</collision>
<inertial>
<mass value="2.5"/>
<origin xyz="0.0 0.0 0.25"/>
<inertia ixx="0.2091" iyy="0.2091" izz="0.002" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<joint name="drugi_sklep" type="continuous">
<axis xyz="1 0 0"/>
<parent link="prvi_segment"/>
<child link="drugi_segment"/>
<origin xyz="0.12 0 0.42" rpy="0 0 0"/>
</joint>
<!-- TCP SEGMENT-->
<link name="TCP_segment">
<visual>
<geometry>
<sphere radius="0.02"/>
</geometry>
<material name="Red"/>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<sphere radius="0.02"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</collision>
<inertial>
<mass value="0.034"/>
<origin xyz="0.0 0.0 0.0"/>
<inertia ixx="0.0000054" iyy="0.0000054" izz="0.0000054" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<joint name="TCP_sklep" type="fixed">
<parent link="drugi_segment"/>
<child link="TCP_segment"/>
<origin xyz="-0.08 0 0.46" rpy="0 0 0"/>
</joint>
</robot>
Simulation starts and the robot acts as 2 DOF pendulum. We can add a pause argument in lauch file, so that the simulation does not run automatically.
<?xml version="1.0"?>
<launch>
<arg name="paused" default="true"/>
<param name="robot_description" textfile="$(find robot_2dof)/urdf/robot2dof.urdf" />
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="paused" value="$(arg paused)"/>
</include>
<node pkg="gazebo_ros" name="spawn_urdf" type="spawn_model" args="-param robot_description -urdf -model robot2dof" />
<!-- -->
</launch>
We see a robot, but it is essentially nonfunctional gazebo interface. It doesn't do anything, and is missing lots of key information that ROS would need to use this robot. Whe we started visualization with urdf_tutorial we had been using joint_state_publisher to specify the pose of each joint. However, the robot itself should provide that information in the real world or in gazebo. Yet without specifying that, Gazebo doesn't know to publish that information. To achieve this and for the robot to be interactive with ROS, we need to specify Plugins and Transmissions.
Gazebo plugin
Gazebo plugin is needed for proper interaction between ROS and Gazebo. We need to dynamically link to the ROS library by adding <gazebo> tag before the closing </robot> tag:
<gazebo>
<plugin name="control" filename="libgazebo_ros_control.so">
<robotNamespace>/MOJROBOT</robotNamespace>
</plugin>
</gazebo>
Transmission
For every joint we need to specify a transmission. Transmission declares how the joint will be driven or controlled. There are three types of transmissions (documentation):
- positional - PositionJointInterface,
- velocity - VelocityJointInterface,
- joint torque - EffortJointInterface.
Before the closing </robot> tag add the following code:
<!-- PRENOSI -->
<transmission name="trans1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="prvi_sklep">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor1">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="trans2">
<type>transmission_interface/SimpleTransmission</type>
<joint name="drugi_sklep">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor2">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
Controlling the 2DOF robot
Now that we linked Gazebo and ROS we want to control the robot. We have to setup the controllers.
First we need to add joint_state_publisher gazebo plugin in urdf file:
<gazebo>
<plugin name="joint_state_publisher" filename="libgazebo_ros_joint_state_publisher.so">
<jointName>prvi_sklep, drugi_sklep</jointName>
</plugin>
</gazebo>
We need to create yaml files with specifications for controllers. yaml will be saved in config folder. Lets move into our src folder of our workspace.
We will create 1 folder:
- folder
configfor storingyamlfiles.
Create yaml file and open it in editor.
Add the following text:
MOJROBOT:
# publish all joint states:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 10
MOJROBOT/gazebo_ros_control/pid_gains:
prvi_sklep: {p: 1000, i: 0, d: 100}
drugi_sklep: {p: 1000, i: 0, d: 100}
In launch file we need to add the following lines:
<rosparam file="$(find robot_2dof)/config/controller.yaml" command="load"/>
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/MOJROBOT"
args="joint_state_controller"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="false" output="screen">
<remap from="/joint_states" to="/MOJROBOT/joint_states" />
</node>
Run the launc file roslaunch robot_2dof zagon_gazebo.launch.
Now we can observe the joint angles. Type into terminal window command rostopic list, we get the list of topics
/MOJROBOT/gazebo_ros_control/pid_gains/drugi_sklep/parameter_descriptions
/MOJROBOT/gazebo_ros_control/pid_gains/drugi_sklep/parameter_updates
/MOJROBOT/gazebo_ros_control/pid_gains/prvi_sklep/parameter_descriptions
/MOJROBOT/gazebo_ros_control/pid_gains/prvi_sklep/parameter_updates
/MOJROBOT/joint_states
/clock
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/joint_states
/rosout
/rosout_agg
/tf
/tf_static
Run command rostopic echo /MOJROBOT/joint_states and you can now track joint angles.
However, we want not just observe joint angles, but also control the robot. We need to add the controller for the individual joints. We will do that by adding joint controller joint_controller. We will first add it to launch file to the controller_spawner:
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/MOJROBOT"
args="joint_state_controller
joint_controller"/> <!--Add this new line-->
Next we need to add it to the yaml file:
MOJROBOT:
# publish all joint states:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 10
joint_controller: #Add this new line
type: position_controllers/JointTrajectoryController #Add this new line
joints: #Add this new line
- prvi_sklep #Add this new line
- drugi_sklep #Add this new line
Now when we run the launch file, we get new rostopics:
/MOJROBOT/joint_controller/command
/MOJROBOT/joint_controller/follow_joint_trajectory/cancel
/MOJROBOT/joint_controller/follow_joint_trajectory/feedback
/MOJROBOT/joint_controller/follow_joint_trajectory/goal
/MOJROBOT/joint_controller/follow_joint_trajectory/result
/MOJROBOT/joint_controller/follow_joint_trajectory/status
/MOJROBOT/joint_controller/state
If we type command rostopic info /MOJROBOT/joint_controller/command we can see which type of message we need to publish to control the robot joints:
Type: trajectory_msgs/JointTrajectory
Publishers: None
Subscribers:
* /gazebo (http://lr-omen:35047/)
To move the robot we need to publish the following message:
rostopic pub /MOJROBOT/joint_controller/command trajectory_msgs/JointTrajectory '{joint_names:["prvi_sklep","drugi_sklep"],points:[{positions:[-0.5, 0.2], time_from_start:[1,0]}]}'
The full files content of the files until this point is linked bellow.
Controlling the 2DOF robot using MoveIt
The aim of this section is to use MoveIt package to send the commands to the Gazebo simulation of the robot. Full documentation for MoveIt is http://docs.ros.org/en/melodic/api/moveit_tutorials/html/index.html. We will use MoveIt Setup Assistant to create MoveIt configuration for our 2DOF robot. We will closely follow the tutorial published on MoveIt page. Here we will give really short overview.
In terminal run command roslaunch moveit_setup_assistant setup_assistant.launch.
-
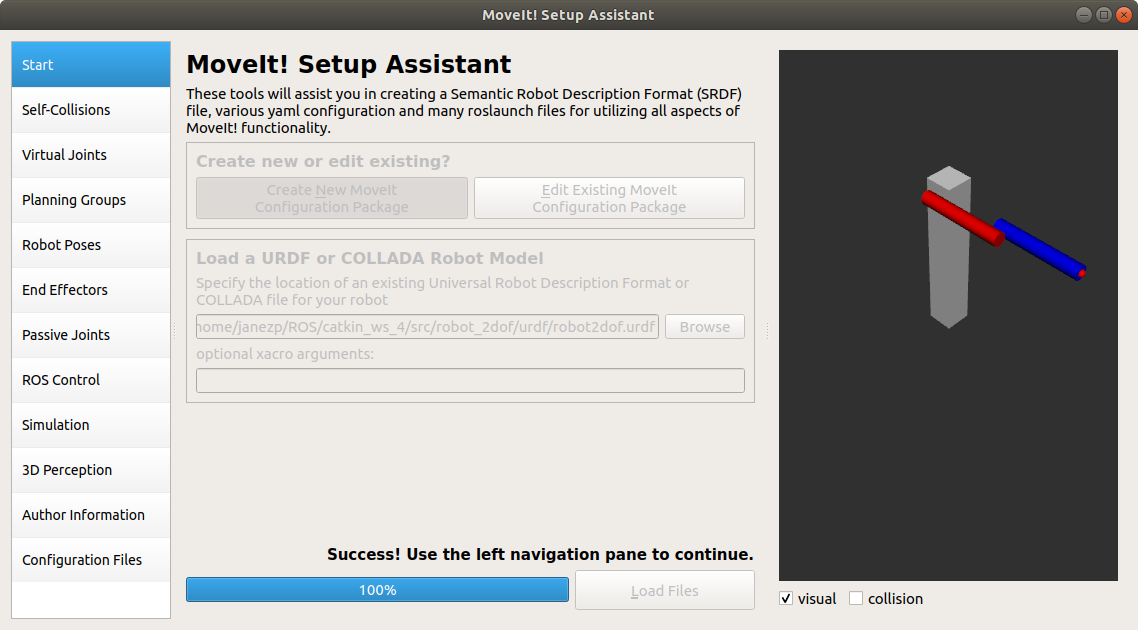
In Start tab select Create New MoveIt Configuration Package and browse for
robot2dof.urdffile. Load the file.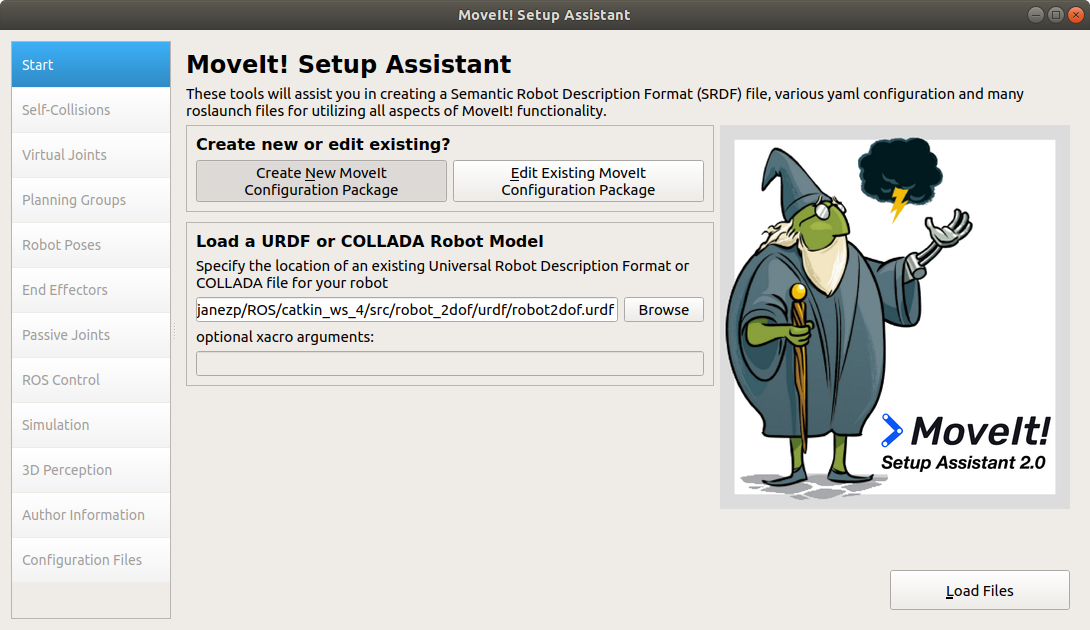
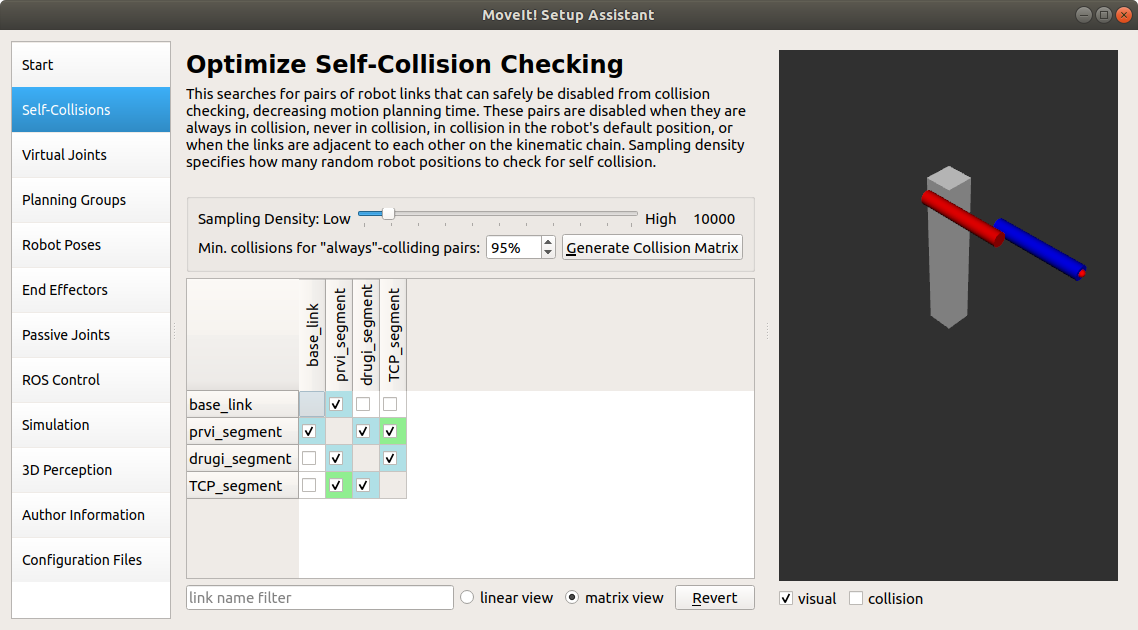
-
Self-Collisins tab. Click on the Generate Collision Matrix button
-
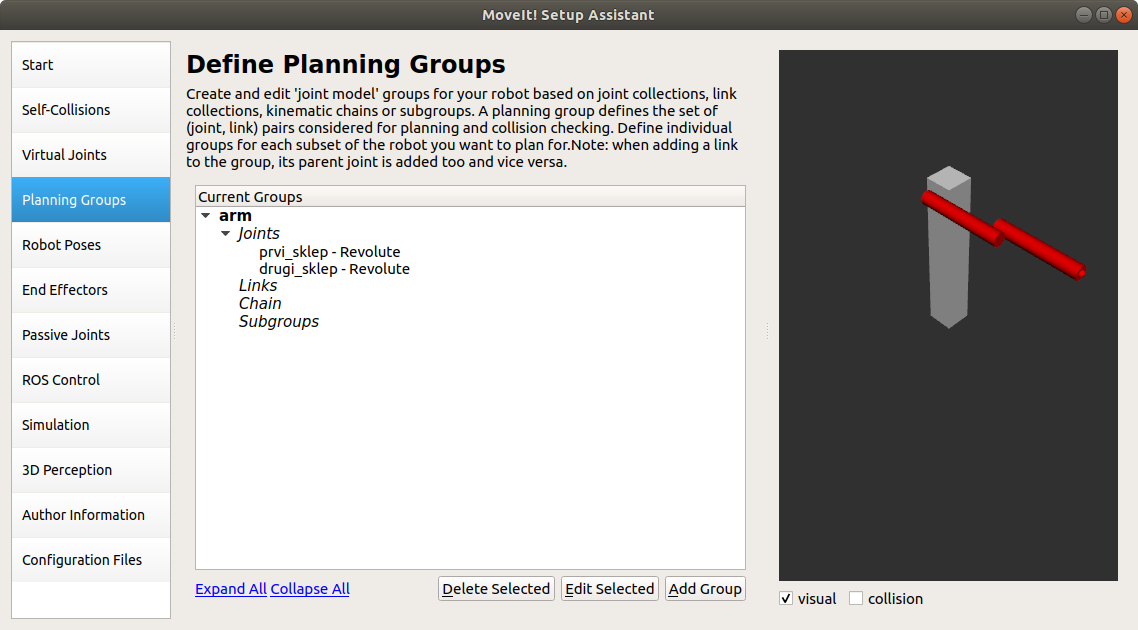
Planning groups tab. Clock on Click on Add Group. You will be presented by new window.
- Enter Group Name as arm.
- Choose kdl_kinematics_plugin/KDLKinematicsPlugin as the kinematics solver.
-
Click on the Add Joints button. You will bepresented by new window. Choose the appropriate joints. See figure bellow. Click Save.
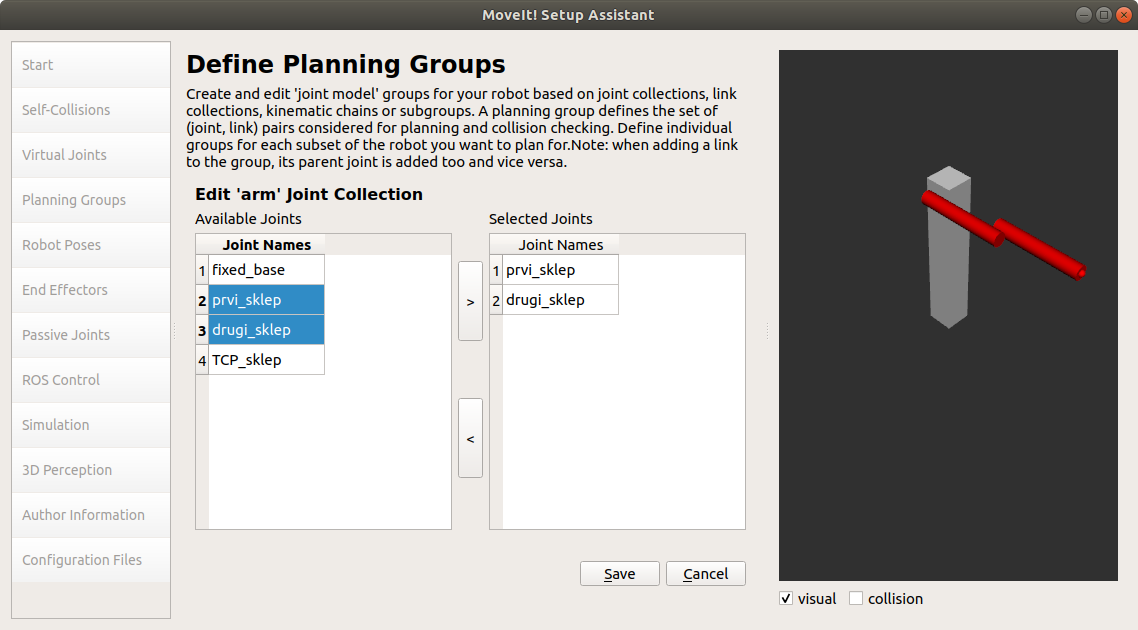
-
Next figure shows most basic definition for the 2DOF robot.
-
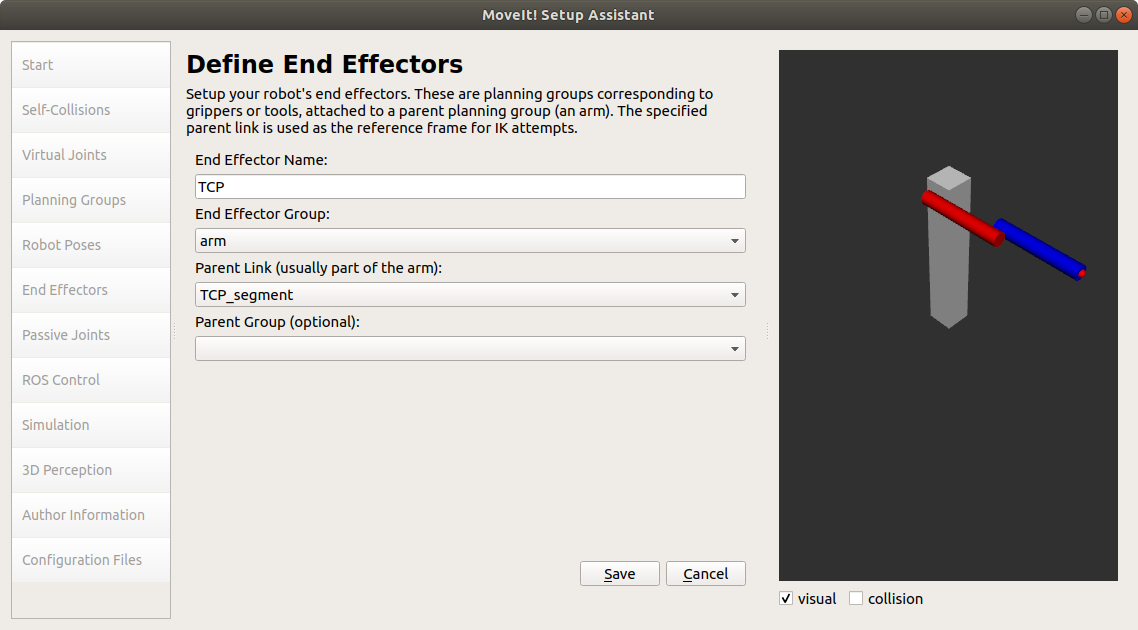
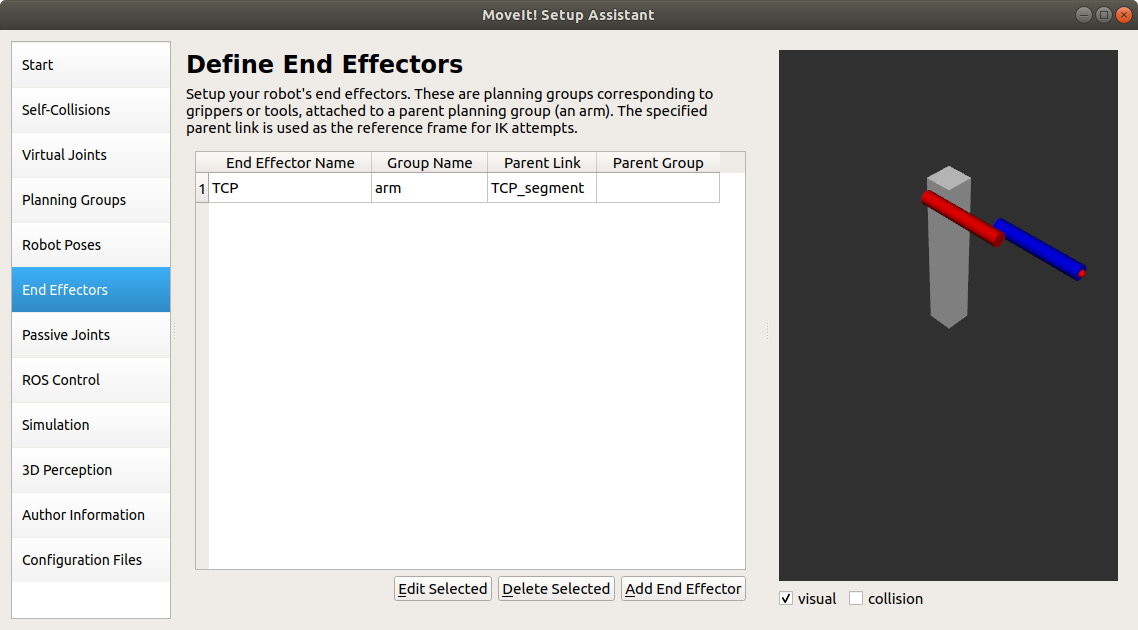
End Effectors tab. Click Add End Effector. You will be presented by new window.
- Choose TCP as the End Effector Name.
-
Choose TCP_segment as the Parent Link for this end-effector. Click Save.
-
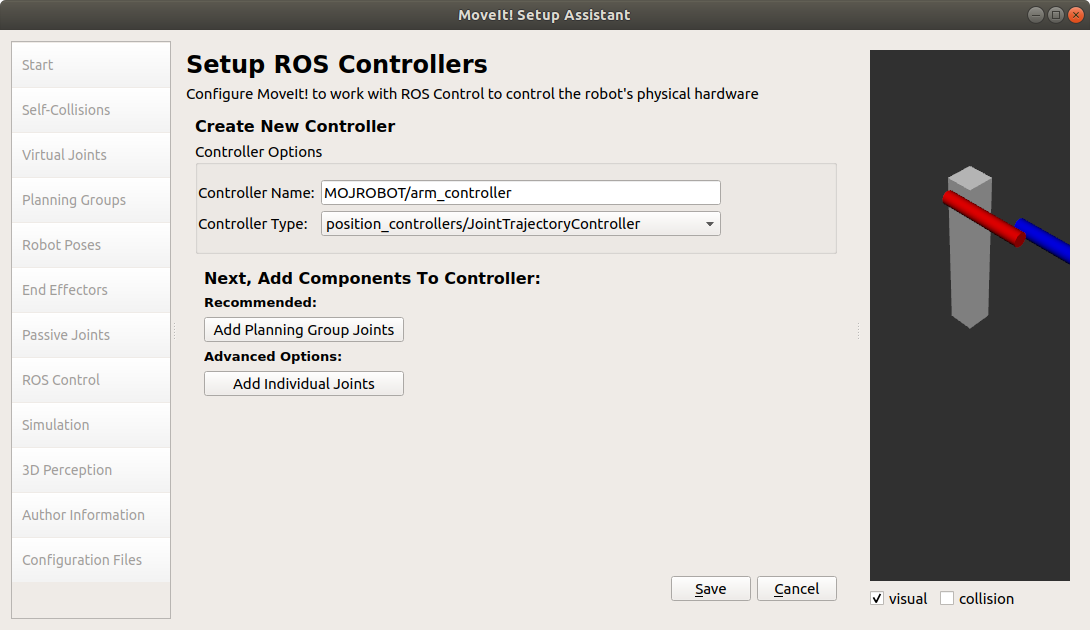
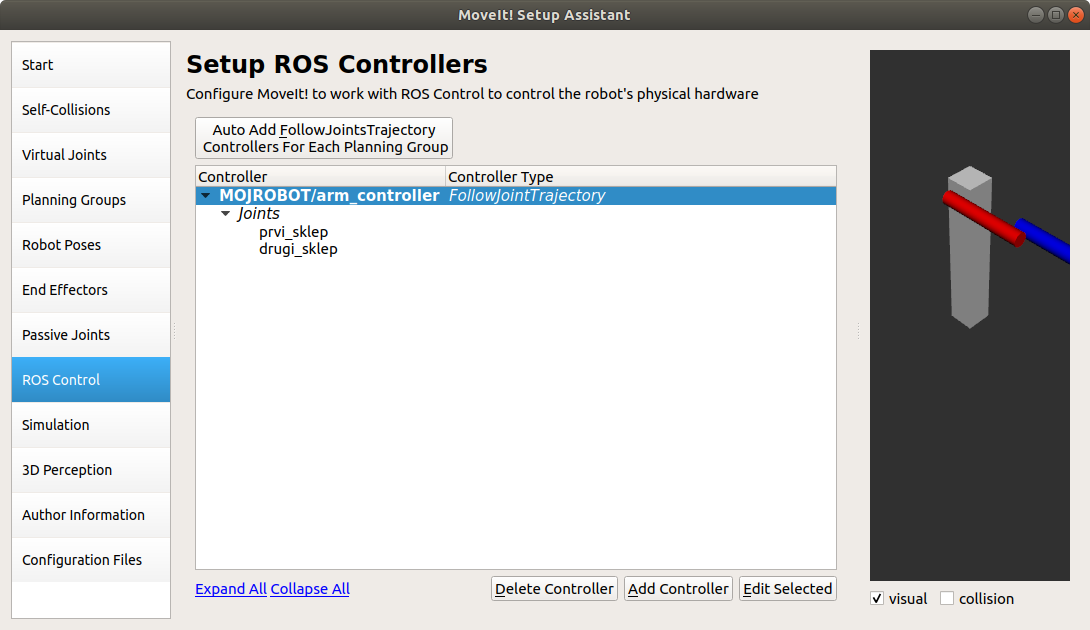
ROS Control tab. Click on Add Controller. Add MOJROBOT/arm_controller for Controller Name and choose controller type. See figure bellow. Click Save . You might get error Invalid ROS controller name. If you get the error close the error dialog. Click the button Auto Add FollowJointsTrajectory Controllers For Each Planning Group*. We will add the correct controller manually later.
-
Author Information tab. Enter your name and email address.
- Configuration Files tab. Create folder
robot_2dof_moveit_configinsrcfolder of your workspace. Browse for that folder and click Generate Package button. The Setup Assistant will now generate and write a set of launch and config files.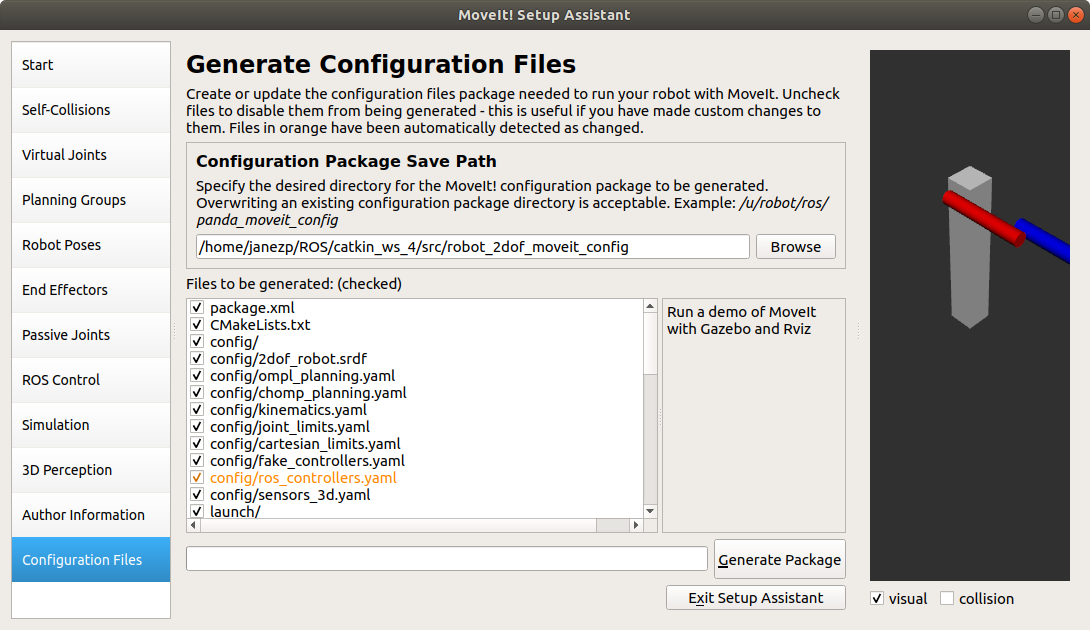
Now that we have created the MoveIt configuration files, we need to edit them so that they can be used with Gazebo. The auto-generated launch and config files are not ready for use in Gazebo. If you run command in terminal roslaunch robot_2dof_moveit_config demo_gazebo.launch you will se that in rviz you can plan movement, but when you want to execurte them the robot in Gazebo does not move. MoveIt generates the file ros_controllers.yaml which is missing definition for controller_list. We also need to add the namespace for our robot.
The required steps are:
- File
ros_controllers.yaml. Add definition for namespace and controller list.
# Publish all joint states
# Creates the /joint_states topic necessary in ROS
MOJROBOT:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
arm_controller:
type: position_controllers/JointTrajectoryController
joints:
- prvi_sklep
- drugi_sklep
gains:
prvi_sklep:
p: 100
d: 1
i: 1
i_clamp: 1
drugi_sklep:
p: 100
d: 1
i: 1
i_clamp: 1
controller_list:
- name: MOJROBOT/arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- prvi_sklep
- drugi_sklep
- File
ros_controllers.launch. This launch file loads Gazebo controllers. We need to add additional controllers tocontroller_spawnernode:
<!-- Load the controllers -->
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" args="--namespace=/MOJROBOT
joint_state_controller
arm_controller
--timeout 20"/>
-
File
demo_gazebo.launch. Definition for nodejoint_state_publisherhas to be changed. Also forrosparamsource_listyou need to add correct namespace. Replace the following lines<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" unless="$(arg use_gui)"> <rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam> <rosparam param="source_list">[joint_states]</rosparam> </node> <node name="joint_state_publisher" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" if="$(arg use_gui)"> <rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam> <rosparam param="source_list">[joint_states]</rosparam> </node>with
The full files content of the files until this point is linked bellow.
A relatively short explanation of the above process can be found on https://medium.com/@tahsincankose/custom-manipulator-simulation-in-gazebo-and-motion-planning-with-moveit-c017eef1ea90
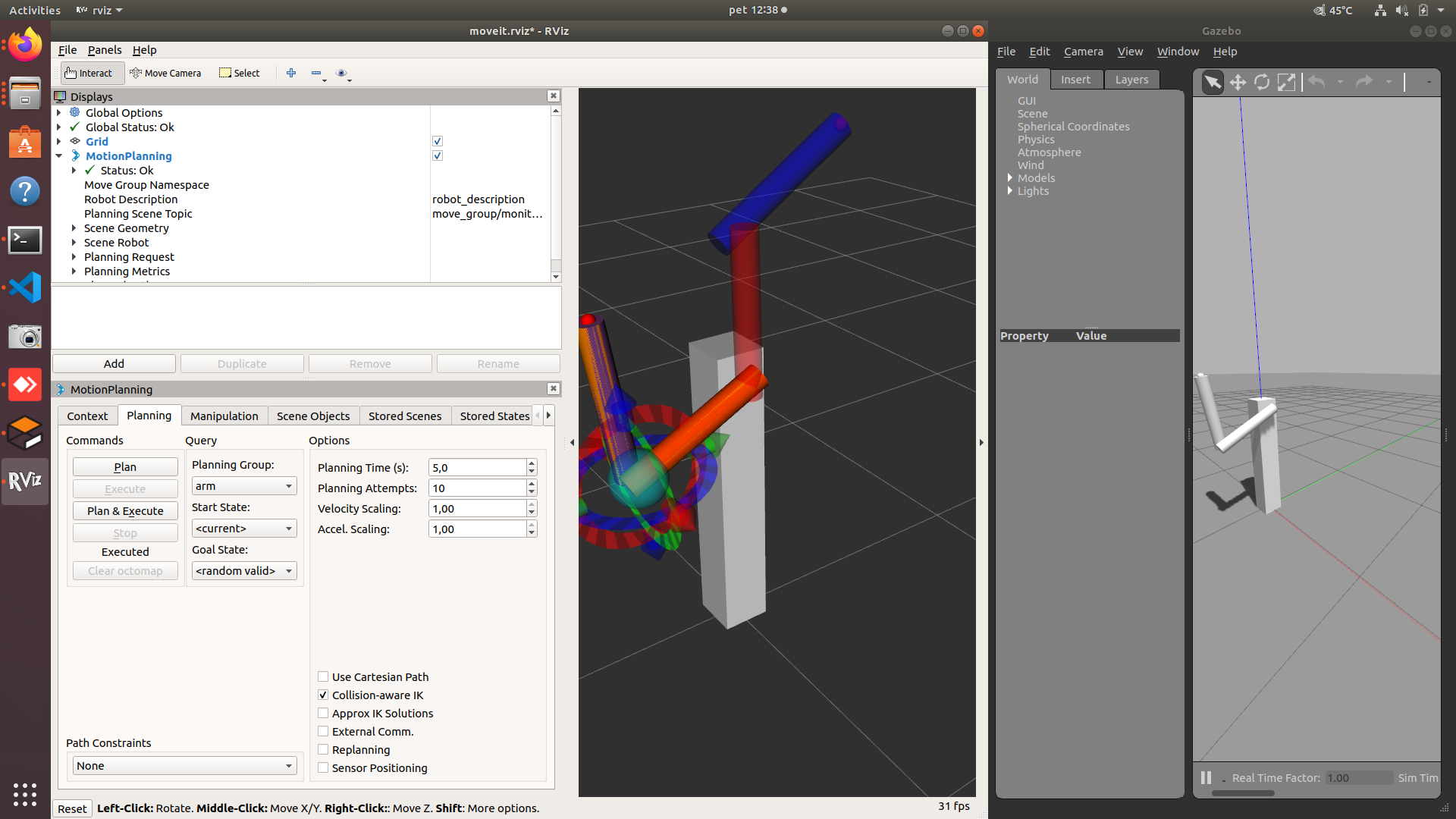
Now when you run command roslaunch robot_2dof_moveit_config demo_gazebo.launch you can move robot in Gazebo.
Sensors
We can add various sensors to the robot in urdf file. Typically we need to create a link for the sensor and a fixed joint to add the link to the link of the robot. Finally we add gazebo and sensor tag with appropriate plugin and parameters for the sensor.
Camera sensor
First we add a link and a joint for the camera sensor in the urdf file for the robot.
<link name="camera_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.05 0.05 0.05"/>
</geometry>
<material name="Black"/>
</visual>
<inertial>
<mass value="1e-5" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" />
</inertial>
</link>
<joint name="camera_joint" type="fixed">
<origin xyz="0.0 0.0 0.06" rpy="0 0 0"/>
<parent link="TCP_segment"/>
<child link="camera_link"/>
</joint>
Next we add the plugin and input camera parameters.
<!-- camera -->
<gazebo reference="camera_link">
<material>Gazebo/Black</material>
<sensor type="camera" name="camera1">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>robot_2dof/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
Laser sensor
First we add a link and a joint for the laser sensor in the urdf file for the robot.
<!-- Sick Laser -->
<link name="sick_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<!--<mesh filename="package://rrbot_description/meshes/hokuyo.dae"/>-->
<box size="0.1 0.1 0.1"/>
</geometry>
</visual>
<inertial>
<mass value="1e-5" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" />
</inertial>
</link>
<joint name="sick_joint" type="fixed">
<axis xyz="0 1 0" />
<origin xyz="0 0.5 0.2" rpy="0 0 0"/>
<parent link="world"/>
<!--<parent link="TCP_segment"/>-->
<child link="sick_link"/>
</joint>
Next we add the plugin and input sensor parameters.
<!-- sick -->
<gazebo reference="sick_link">
<sensor type="ray" name="head_sick_sensor">
<pose>0 0 0 0 0 0</pose>
<visualize>true</visualize>
<update_rate>40</update_rate>
<ray>
<scan>
<horizontal>
<samples>720</samples>
<resolution>1</resolution>
<min_angle>-1.570796</min_angle>
<max_angle>1.570796</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<!-- Noise parameters based on published spec for Hokuyo laser
achieving "+-30mm" accuracy at range < 10m. A mean of 0.0m and
stddev of 0.01m will put 99.7% of samples within 0.03m of the true
reading. -->
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_head_sick_controller" filename="libgazebo_ros_laser.so">
<topicName>/robot_2dof/laser/scan</topicName>
<frameName>sick_link</frameName>
</plugin>
</sensor>
</gazebo>
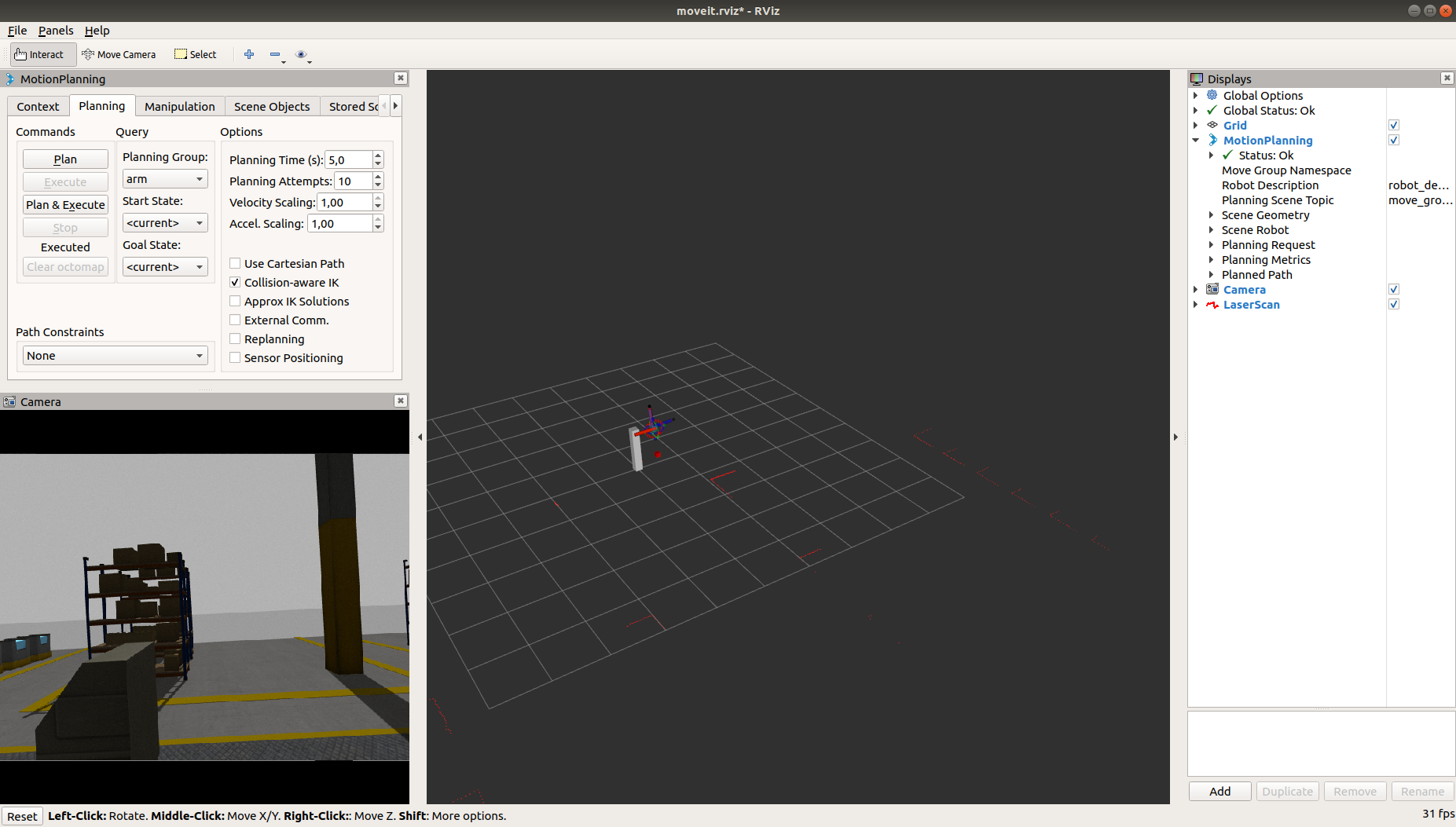
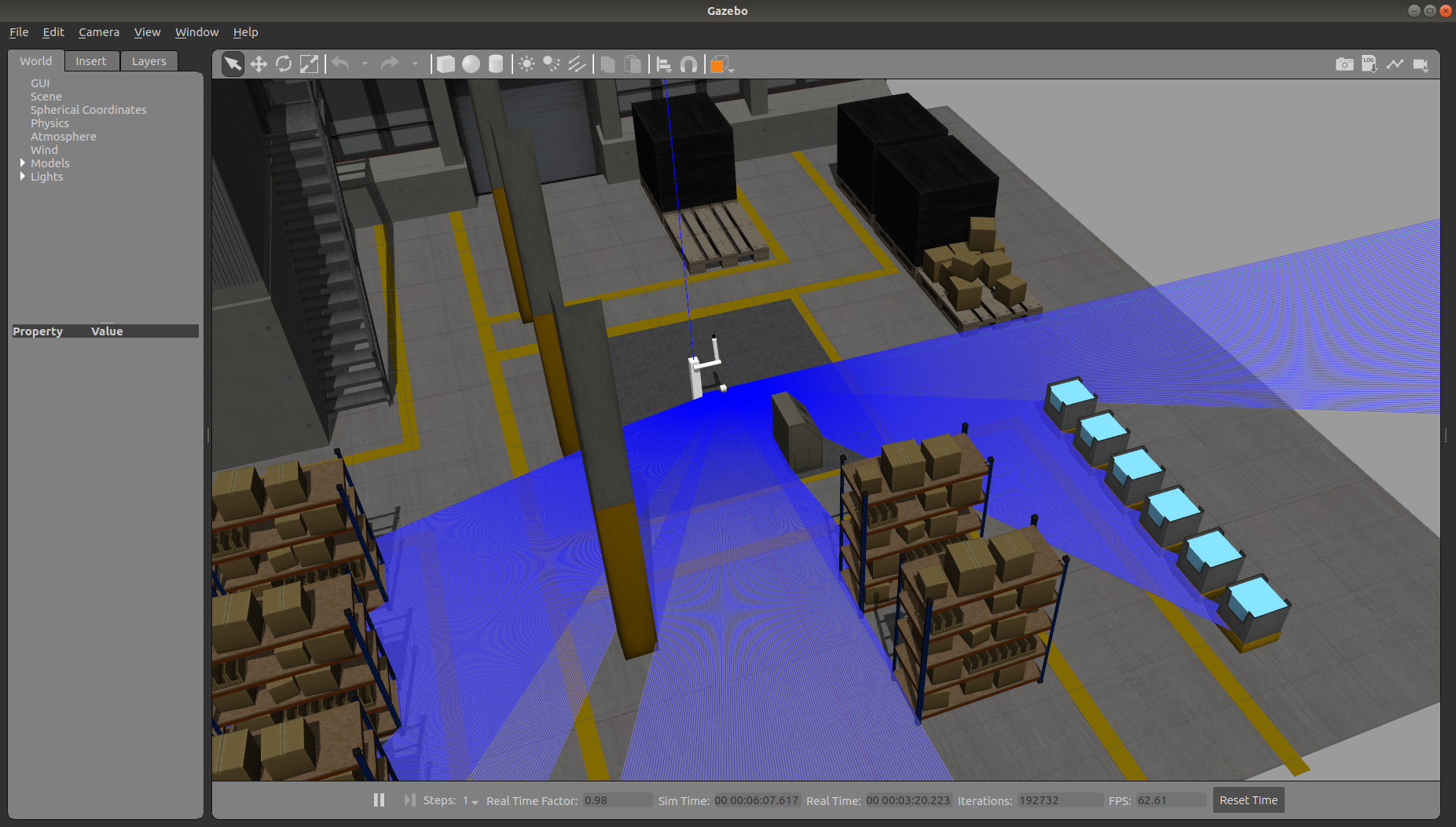
Warehouse environment
We will add the model for warehouse environment.
Copy file warehouse.zip into folder robot_2dof_moveit_config and unzip it. You must unzip it directly into folder robot_2dof_moveit_config so that the folder contains new folders worlds, meshes and models.
In gazebo.launch change the line
with
Before the line
Add the following lines
<!-- warehouse simulation environment -->
<env name="GAZEBO_MODEL_PATH" value="${GAZEBO_MODEL_PATH}:$(find robot_2dof_moveit_config)/models"/>
<env name="GAZEBO_RESOURCE_PATH" value="${GAZEBO_RESOURCE_PATH}:$(find robot_2dof_moveit_config)/models"/>
File warehouse_2.world contains description of the warehouse environment.
Code snapshots
Snapshot 1
File robot2dof.urdf
<?xml version="1.0"?>
<robot name="2dof_robot">
<material name="White">
<color rgba="1.0 1.0 1.0 1.0"/>
</material>
<material name="Blue">
<color rgba="0.0 0.0 1.0 1.0"/>
</material>
<material name="Red">
<color rgba="1 0 0 1.0"/>
</material>
<material name="Black">
<color rgba="0 0 0 1.0"/>
</material>
<link name="world"/>
<!-- BASE LINK-->
<link name="base_link">
<visual>
<geometry>
<box size="0.16 0.16 1.0"/>
</geometry>
<material name="White"/>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<box size="0.16 0.16 1.0"/>
</geometry>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
</collision>
<inertial>
<mass value="25"/>
<origin xyz="0.0 0.0 0.5"/>
<inertia ixx="8.741" iyy="8.741" izz="0.4367" ixy="-0.1637" ixz="-0.1023" iyz="-0.1023"/>
</inertial>
</link>
<joint name="fixed_base" type="fixed">
<parent link="world"/>
<child link="base_link"/>
</joint>
<!-- PRVI SEGMENT-->
<link name="prvi_segment">
<visual>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<material name="Red"/>
<origin xyz="0.12 0.0 0.21" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<origin xyz="0.12 0.0 0.21" rpy="0.0 0.0 0.0"/>
</collision>
<inertial>
<mass value="2.5"/>
<origin xyz="0.0 0.0 0.25"/>
<inertia ixx="0.2091" iyy="0.2091" izz="0.002" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<joint name="prvi_sklep" type="continuous">
<axis xyz="1 0 0"/>
<parent link="base_link"/>
<child link="prvi_segment"/>
<origin xyz="0.0 0 0.92" rpy="-1.5707 0 0"/>
</joint>
<!-- DRUGI SEGMENT-->
<link name="drugi_segment">
<visual>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<material name="Blue"/>
<origin xyz="-0.08 0.0 0.21" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.04" length="0.5"/>
</geometry>
<origin xyz="-0.08 0.0 0.21" rpy="0.0 0.0 0.0"/>
</collision>
<inertial>
<mass value="2.5"/>
<origin xyz="0.0 0.0 0.25"/>
<inertia ixx="0.2091" iyy="0.2091" izz="0.002" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<joint name="drugi_sklep" type="continuous">
<axis xyz="1 0 0"/>
<parent link="prvi_segment"/>
<child link="drugi_segment"/>
<origin xyz="0.12 0 0.42" rpy="0 0 0"/>
</joint>
<!-- TCP SEGMENT-->
<link name="TCP_segment">
<visual>
<geometry>
<sphere radius="0.02"/>
</geometry>
<material name="Red"/>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</visual>
<collision>
<geometry>
<sphere radius="0.02"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</collision>
<inertial>
<mass value="0.034"/>
<origin xyz="0.0 0.0 0.0"/>
<inertia ixx="0.0000054" iyy="0.0000054" izz="0.0000054" ixy="0.0" ixz="0.0" iyz="0.0"/>
</inertial>
</link>
<joint name="TCP_sklep" type="fixed">
<parent link="drugi_segment"/>
<child link="TCP_segment"/>
<origin xyz="-0.08 0 0.46" rpy="0 0 0"/>
</joint>
<!-- PRENOSI -->
<transmission name="trans1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="prvi_sklep">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor1">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="trans2">
<type>transmission_interface/SimpleTransmission</type>
<joint name="drugi_sklep">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor2">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<gazebo>
<plugin name="control" filename="libgazebo_ros_control.so">
<robotNamespace>/MOJROBOT</robotNamespace>
</plugin>
</gazebo>
<gazebo>
<plugin name="joint_state_publisher" filename="libgazebo_ros_joint_state_publisher.so">
<jointName>prvi_sklep, drugi_sklep</jointName>
</plugin>
</gazebo>
</robot>
File zagon_gazebo.launch
<?xml version="1.0"?>
<launch>
<arg name="paused" default="true"/>
<param name="robot_description" textfile="$(find robot_2dof)/urdf/robot2dof.urdf" />
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="paused" value="$(arg paused)"/>
</include>
<node pkg="gazebo_ros" name="spawn_urdf" type="spawn_model" args="-param robot_description -urdf -model robot2dof" />
<rosparam file="$(find robot_2dof)/config/controller.yaml" command="load"/>
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/MOJROBOT"
args="joint_state_controller
joint_controller"/> <!--##NOVO-->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="false" output="screen">
<remap from="/joint_states" to="/MOJROBOT/joint_states" />
</node>
<!-- -->
</launch>
File controller.yaml
MOJROBOT:
# publish all joint states:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 10
joint_controller: ##NOVO
type: position_controllers/JointTrajectoryController ##NOVO
joints: ##NOVO
- prvi_sklep ##NOVO
- drugi_sklep ##NOVO
MOJROBOT/gazebo_ros_control/pid_gains:
prvi_sklep: {p: 1000, i: 0, d: 100}
drugi_sklep: {p: 1000, i: 0, d: 100}
Snapshot 2
File ros_controllers.yaml
# Simulation settings for using moveit_sim_controllers
moveit_sim_hw_interface:
joint_model_group: arm
joint_model_group_pose: home
# Settings for ros_control_boilerplate control loop
generic_hw_control_loop:
loop_hz: 300
cycle_time_error_threshold: 0.01
# Settings for ros_control hardware interface
hardware_interface:
joints:
- prvi_sklep
- drugi_sklep
sim_control_mode: 1 # 0: position, 1: velocity
# Publish all joint states
# Creates the /joint_states topic necessary in ROS
MOJROBOT:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
arm_controller:
type: position_controllers/JointTrajectoryController
joints:
- prvi_sklep
- drugi_sklep
gains:
prvi_sklep:
p: 100
d: 1
i: 1
i_clamp: 1
drugi_sklep:
p: 100
d: 1
i: 1
i_clamp: 1
controller_list:
- name: MOJROBOT/arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- prvi_sklep
- drugi_sklep
File ros_controllers.launch
<?xml version="1.0"?>
<launch>
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find robot_2dof_moveit_config)/config/ros_controllers.yaml" command="load"/>
<!-- Load the controllers -->
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" args="--namespace=/MOJROBOT
joint_state_controller
arm_controller
--timeout 20"/>
</launch>
File demo_gazebo.launch
<launch>
<!-- By default, we do not start a database (it can be large) -->
<arg name="db" default="false" />
<!-- Allow user to specify database location -->
<arg name="db_path" default="$(find robot_2dof_moveit_config)/default_warehouse_mongo_db" />
<!-- By default, we are not in debug mode -->
<arg name="debug" default="false" />
<!-- By default, we won't load or override the robot_description -->
<arg name="load_robot_description" default="false"/>
<!--
By default, hide joint_state_publisher's GUI
MoveIt!'s "demo" mode replaces the real robot driver with the joint_state_publisher.
The latter one maintains and publishes the current joint configuration of the simulated robot.
It also provides a GUI to move the simulated robot around "manually".
This corresponds to moving around the real robot without the use of MoveIt.
-->
<arg name="use_gui" default="false" />
<!-- Gazebo specific options -->
<arg name="gazebo_gui" default="true"/>
<arg name="paused" default="false"/>
<!-- By default, use the urdf location provided from the package -->
<arg name="urdf_path" default="$(find robot_2dof)/urdf/robot2dof.urdf"/>
<!-- launch the gazebo simulator and spawn the robot -->
<include file="$(find robot_2dof_moveit_config)/launch/gazebo.launch" >
<arg name="paused" value="$(arg paused)"/>
<arg name="gazebo_gui" value="$(arg gazebo_gui)"/>
<arg name="urdf_path" value="$(arg urdf_path)"/>
</include>
<!-- If needed, broadcast static tf for robot root -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="use_gui" value="$(arg use_gui)"/>
<rosparam param="source_list">[MOJROBOT/joint_states]</rosparam>
</node>
<!-- We do not have a robot connected, so publish fake joint states
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" unless="$(arg use_gui)">
<rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam>
<rosparam param="source_list">[MOJROBOT/joint_states]</rosparam>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" if="$(arg use_gui)">
<rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam>
<rosparam param="source_list">[MOJROBOT/joint_states]</rosparam>
</node>-->
<!-- Given the published joint states, publish tf for the robot links -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="true" output="screen" />
<!-- Run the main MoveIt! executable without trajectory execution (we do not have controllers configured by default) -->
<include file="$(find robot_2dof_moveit_config)/launch/move_group.launch">
<arg name="allow_trajectory_execution" value="true"/>
<arg name="fake_execution" value="false"/>
<arg name="info" value="true"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="load_robot_description" value="$(arg load_robot_description)"/>
</include>
<!-- Run Rviz and load the default config to see the state of the move_group node -->
<include file="$(find robot_2dof_moveit_config)/launch/moveit_rviz.launch">
<arg name="rviz_config" value="$(find robot_2dof_moveit_config)/launch/moveit.rviz"/>
<arg name="debug" value="$(arg debug)"/>
</include>
<!-- If database loading was enabled, start mongodb as well -->
<include file="$(find robot_2dof_moveit_config)/launch/default_warehouse_db.launch" if="$(arg db)">
<arg name="moveit_warehouse_database_path" value="$(arg db_path)"/>
</include>
</launch>
https://github.com/wh200720041/warehouse_simulation_toolkit
Common Pitfalls and Tips for Creating URDF Files
Creating URDF (Unified Robot Description Format) files can be challenging, especially for beginners. Small errors in URDF files can lead to significant issues in robot simulation, control, and motion planning. In this section, we will discuss some common pitfalls encountered while creating URDF files and provide tips to avoid these errors. Understanding these pitfalls and best practices will help ensure your robot models are accurate, functional, and easy to debug.
Incorrect Syntax and Formatting Errors
Pitfall: One of the most common issues with URDF files is incorrect syntax or formatting, such as missing tags, incorrect nesting of elements, or improperly closed tags. URDF is based on XML, which is strict about structure and format. Any deviation from the proper syntax will cause the parser to fail, resulting in errors when loading the robot model.
Tips:
- Use a Code Editor with XML Syntax Highlighting: An editor that highlights XML syntax can help spot missing or mismatched tags. Some editors also offer real-time validation and suggest corrections.
- Validate URDF Files: Use ROS tools like check_urdf to validate the syntax of your URDF file. This tool checks for XML errors and validates that all required tags are present.
- Keep XML Clean and Readable: Properly indent your URDF file to make it more readable and easier to spot syntax errors. This will also help in understanding the hierarchy of elements, such as links and joints.
Example Command for Validation:
Incorrect Inertia and Mass Properties
Pitfall: Incorrectly defining inertia and mass properties can cause unrealistic physical behaviors in the simulation. For example, setting the mass too high or too low can lead to unstable simulations, and incorrect inertia values can cause unexpected rotations or movements.
Tips: - Calculate Accurate Inertia Values: Use tools or scripts to calculate accurate inertia tensors for different shapes. For simple geometries like boxes, cylinders, and spheres, the inertia can be calculated using standard formulas. For complex shapes, consider using CAD software or specialized tools to compute the inertia tensor. - Set Realistic Mass Values: Ensure that the mass values for each link are realistic relative to the robot’s size and material. Unrealistic mass values can make the simulation behave incorrectly, such as making a robot too heavy to move or too light to stand still. - Test Physical Properties Incrementally: Start with simple simulations to test physical properties. Gradually add complexity and adjust mass and inertia values to observe how they affect the simulation.
Incorrect Joint Definitions and Limits
Pitfall: Defining joints incorrectly, such as misconfiguring their type, axis of rotation, or limits, can lead to unexpected robot behavior. This could cause joints to move in unintended ways, become locked, or result in instability during simulation.
Tips:
- Correctly Define Joint Types: Ensure the joint type (e.g., revolute, prismatic, fixed) matches the intended movement for each connection between links. A common mistake is to set a joint type incorrectly, causing the robot to behave in an unintended manner.
- Set Appropriate Joint Limits: Define realistic lower and upper limits for each joint to avoid unnatural movements. For example, a human-like arm joint should have a limited range to reflect real-world constraints.
- Align Joint Axis Properly: Ensure the joint’s axis of rotation or translation is correctly aligned. Misaligned axes can cause the robot parts to move in unexpected directions.
Example URDF Snippet for a Correct Joint Definition:
<joint name="elbow_joint" type="revolute">
<parent link="upper_arm" />
<child link="lower_arm" />
<origin xyz="0 0 1" rpy="0 0 0" />
<axis xyz="0 0 1" />
<limit lower="-1.57" upper="1.57" effort="50" velocity="1.0" />
</joint>
Misaligned Visual and Collision Elements
Pitfall: Misalignment between visual and collision elements can cause issues where the robot appears correctly but does not interact with the environment as expected. For example, the robot might visually clear an obstacle, but its collision model might still make contact, causing unexpected behavior.
Tips:
- Ensure Alignment of Visual and Collision Geometries: When defining the visual and collision elements, make sure they are aligned and positioned correctly relative to each other. Use the same origin and orientation where possible to avoid discrepancies.
- Simplify Collision Models: Use simpler geometries for collision models to reduce computational load and improve simulation performance. It is common practice to use basic shapes (boxes, cylinders, spheres) for collision while keeping complex shapes for visual representation.
- Visualize Collision Models in Simulation: Enable collision model visualization in Gazebo to verify that they match the visual models and are positioned correctly. This can help identify and correct misalignments.
Example URDF Snippet for Aligned Visual and Collision Elements:
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="package://my_robot/meshes/visual/arm.stl" scale="1 1 1" />
</geometry>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 1.0" />
</geometry>
</collision>
Overly Complex URDF Files
Pitfall: Creating an overly complex URDF file with too many details, high-resolution meshes, or unnecessary elements can make the robot model difficult to manage, slow to load, and hard to debug.
Tips:
- Use Simplified Models for Prototyping: Start with simplified robot models to test the basic functionality before adding complexity. This makes debugging easier and speeds up the simulation.
- Optimize Meshes for Performance: When using mesh files, ensure they are optimized for performance. High-resolution meshes can drastically slow down the simulation. Use lower-resolution meshes for collision elements and consider using simpler geometries where possible.
- Modularize URDF Files: Break down the URDF into smaller, manageable files using the
format, which allows for parameterization and reuse of components. This approach makes the URDF easier to read, edit, and maintain.
Not Accounting for ROS and Gazebo Integration Differences
Pitfall: Failing to account for differences between how ROS and Gazebo interpret URDF files can lead to discrepancies between simulation and real-world behavior. For example, certain tags like
Tips:
- Separate Simulation-Specific Tags: Use Gazebo-specific tags within
elements to define properties like friction, damping, or custom sensors that are only relevant to the simulation. - Ensure Consistency Between Simulation and Real-World Models: When defining transmissions and controllers, ensure that the URDF’s hardware interface definitions align with both Gazebo and ROS Control requirements.
- Test in Both Environments: Regularly test the URDF in both Gazebo and ROS environments to ensure consistent behavior and to identify any discrepancies early on.
Example URDF Snippet for Gazebo-Specific Tags: